B-spline curve
¶B-spline curve
原文連結: https://darkblack01.blogspot.com/2013/11/b-spline-curve.html
移植時的最後更新日期: 2016-06-13T10:59:43.499+08:00
B-Spline又稱B樣條曲線,b是base的意思,所以叫基礎樣條曲線(嗎?)
B-Spline包含貝茲曲線,也就是說,B-Spline的其中一種參數組合,等於貝茲曲線。
此領域為數學中的「數值分析>插值法>B樣條插值」
不同於「樣條插值法」,在此的除了兩端控制點不通過曲線本身
B-Spline
定義之前,先給個「變數關係圖」,圖形化整個參數脈胳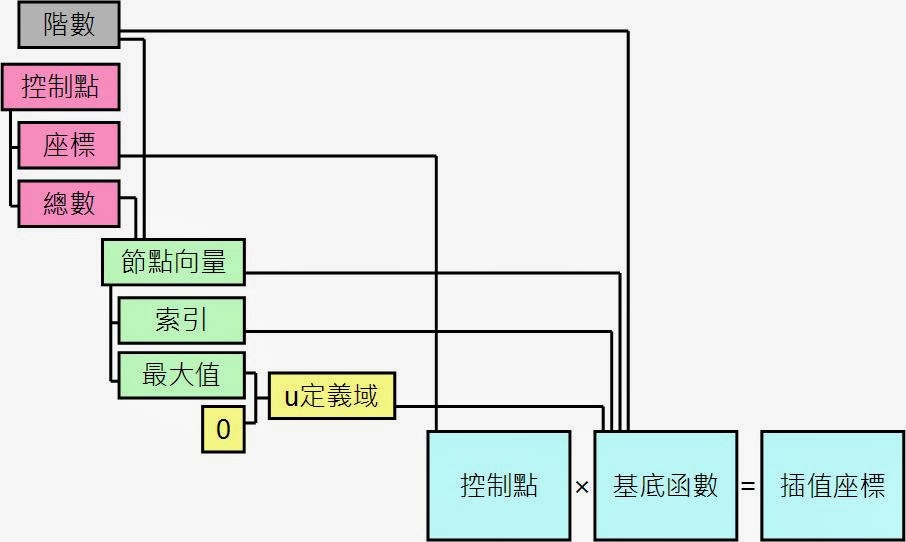
- 基底函數
- 為B-Spline函數的係數,將控制點座標移動的「移動百分比」,將座標的x與y乘上一個數字,變成另一個位置,達到「插值」的作用。
控制點座標(x, y定義為正整數)
- 和高中學的解析幾何一樣,在此定義在二維空間p(x,y)。
- 控制點總數(n+1)(注意,在此由0計數,總數為n+1)。
子函數總數(n定義為正整數)
- 方程式包含控制點總數(n+1),控制點彼此之間是一個區間,區間由一個k次方程式表示,而n指的是方程式數量。
索引值(i定義為正整數)
- 由0開始計數到n。
維度(k定義為正整數)
- 在此也稱為方程式的(最高)次方,就意義上來說,指的是「區域控制的影響範圍」
節點向量(knot vector)
除了這個方程式,還有一個數列要介紹,就是節點向量(knot vector)
要得到節點向量必須要有兩件已知:
- 維度(k)
- 控制點總數(n+1)
| knot vector從0開始計數,最後一個索引值(n+k+1)再+1為總數。 |
定義t0、t1、t2、t3、t4、t5…、t(n+k+1)的值如下:
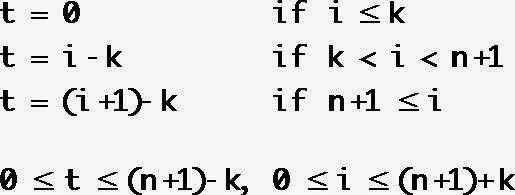 |
| 本定義盡量使用n+1與k,而不使用k+1和n是因為n+1定義成控制點總數,而k是維度,有直接定義,概念性直接。 |
依照定義,將所有的t判斷出來(在此並不是靠運算)
接下來就是將t0、t1、t2、t3、t4、t5…、t(n+k+1)畫出來,成為下圖
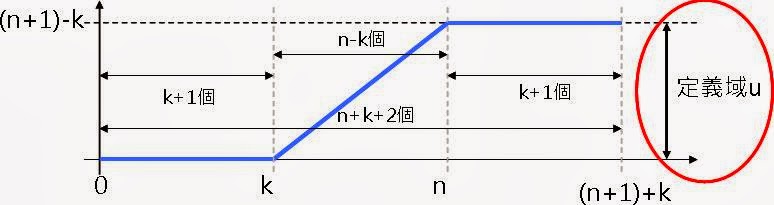
我們先看懂節點向量表達的東西,在此還無法全面的解釋其意義。
它可以得到
- 節點向量總數:(n+1)+k
- 節點向量最大值:(n+1)-k
- 節點向量最小值:0
其定義域為u: [0, (n+1)-k]
基底函數的值皆由此取值運算得到。
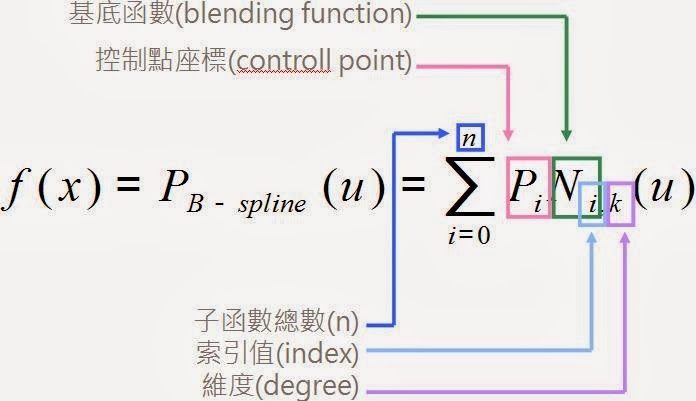
基底函數
基底函數
(basis function or blending function)
主方程式除了控制點座標就是這個鬼東西了!這也是整個方程式中最不好看懂的部份。
原因在於它的遞迴關係。
定義:
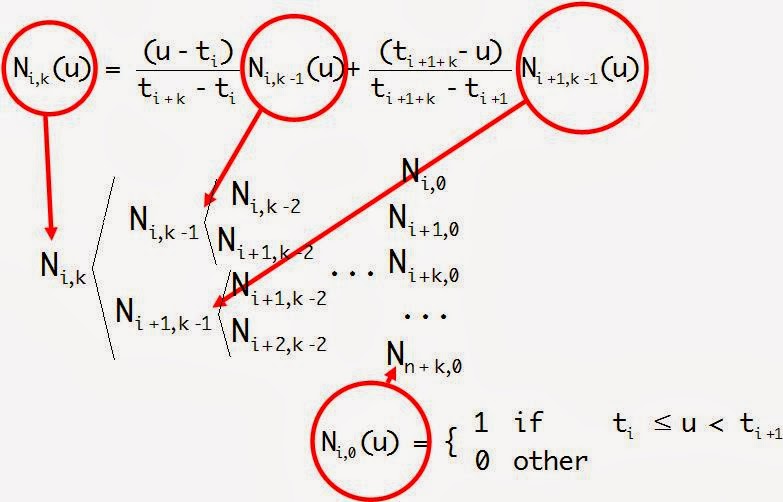
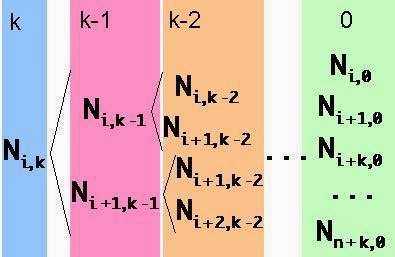
上式的遞迴關係,這樣看有點小複雜,讓我們把式子「攤開」來!
 我們先試著把遞迴完的式子代進來,發現遞迴到最後,式子會由兩個部份組成
我們先試著把遞迴完的式子代進來,發現遞迴到最後,式子會由兩個部份組成
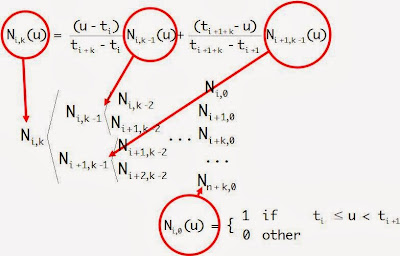
可以看見,在每一層的k和i的變化。
整個基底函數的式子,會如下:
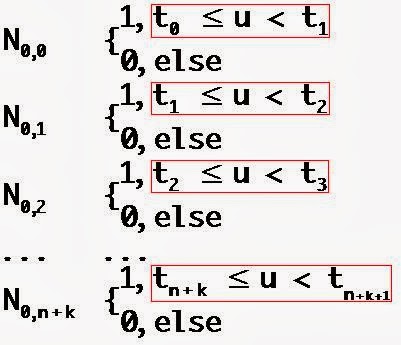
基底函數的判斷條件,就由Ni,0的定義決定。
ex:
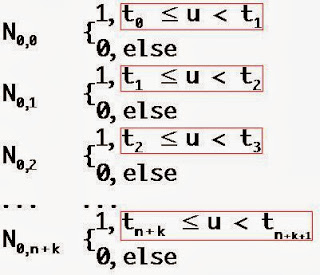 因為k的關係,節點向量的頭尾都會有一段,值都相等,所以靠近N0,0和N0, n+k都會等於0,只有中間的值會等於1(有值),而中間會有幾個區間為有效(N0,k=1),但是邊界條件各有不同。
因為k的關係,節點向量的頭尾都會有一段,值都相等,所以靠近N0,0和N0, n+k都會等於0,只有中間的值會等於1(有值),而中間會有幾個區間為有效(N0,k=1),但是邊界條件各有不同。
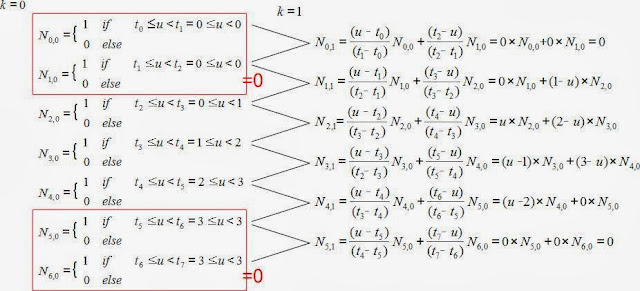
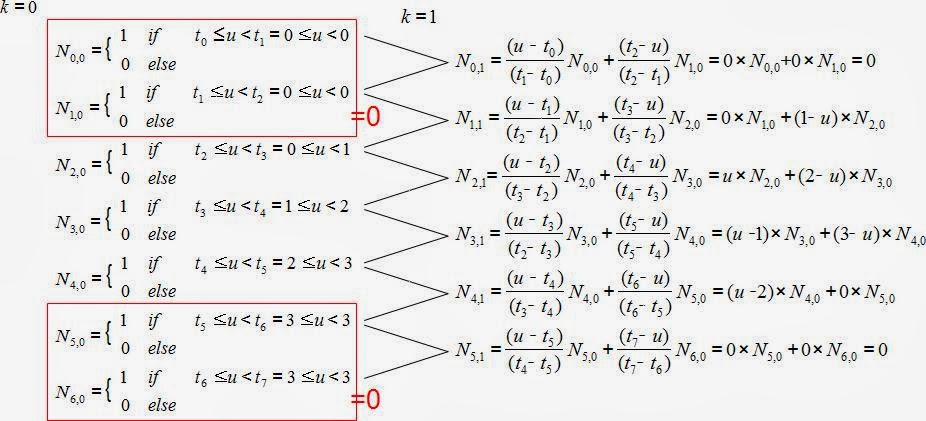
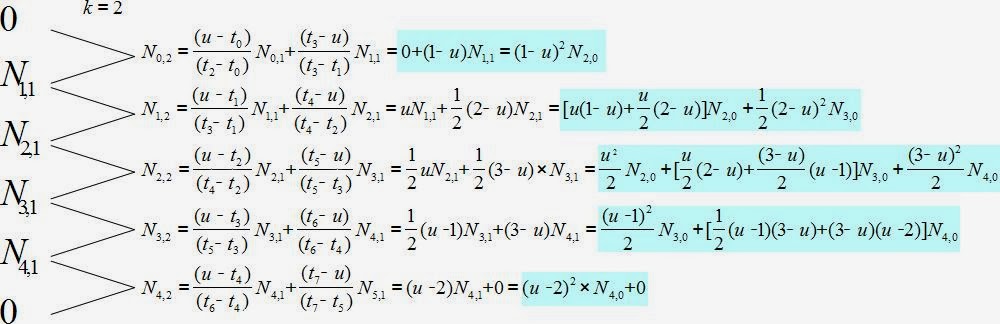
來試算一下吧!
我們拿參考資料[1]的例子來精算一次。
設k=2, n+1=5
定義0≦u≦3, u為實數(有小數點的)
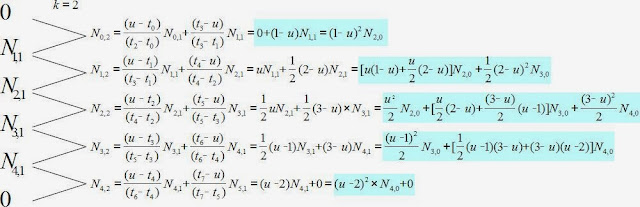
在此例中,基底函數的最後五個函數,畫出來如下圖(圖中k=2, n=4(5個控制點))
x軸是我們的u,也就是定義域。
y是基底函數輸出的值。
注意:
幾條線就是幾個控制點×基底函數(N0,k~Nn,k)。
如果k等於n,那就是貝茲曲線了
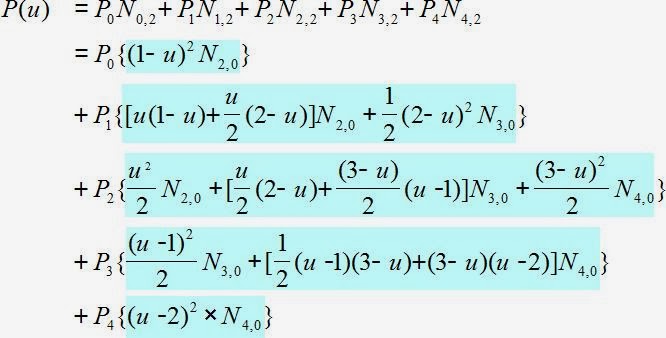
最後把全部的東西,通通代入原式
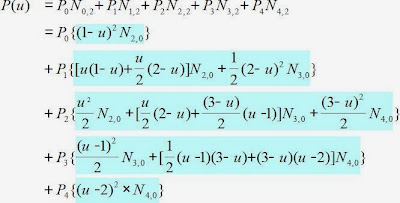
依Ni,0的各個邊界條件整理一下式子,如下:
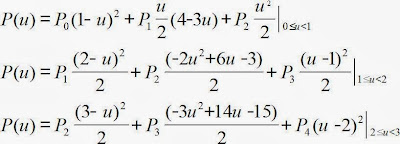 式子要表達的如下:
式子要表達的如下:
變動P0,第3式和第2式的曲線不受影響。
變動P1,第3式的曲線不受影響。
變動P2,全部都受影響。
變動P3,第1式的曲線不受影響。
變動P4,第1式和第2式的曲線不受影響。
f(x)=PB-spline(u)的意義,是一個點,定義在2維空間中p(x,y)
最後呈現出來的就像這樣,控制點沒有在曲線上面(像貝茲曲線這樣)
參考資料:
[1] 張家源,B-Spline 有限元素法解三維彈性力學問題,碩士論文,國立成功大學機械工程學系,台南(2008)
[2] Computer Graphics and Visualisation
原因在於它的遞迴關係。
定義:
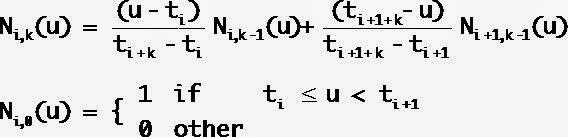 |
| 上式是遞迴關係,下式是遞迴終端該是什麼值。 在此終端也是判斷出來的,並不是運算出來的。 |
上式的遞迴關係,這樣看有點小複雜,讓我們把式子「攤開」來!

- u和節點向量的數字t
- 下一層的Ni,k
 |
| 在k=0, 遞迴出來的索引值最多不會超過節點向量的範圍 (total: (n+k)+1, 最後一個值的索引為t(n+k) ) |
 |
| T0(u)是k次方的運算式,隨著i遞增,k也會改變。 |
基底函數的判斷條件,就由Ni,0的定義決定。
ex:
運算範例
看到這,有點花花厚?!來試算一下吧!
我們拿參考資料[1]的例子來精算一次。
設k=2, n+1=5
節點向量如下
下圖,是依「定義域、值域」分成三大色塊,黃色值域為0,藍色的值域為最大值n+1-k,紅色則是其它平均分佈的中間值。 |
| 最上面是節點向量與索引值的值域定義。 最下面是節點向量的值與索引值的內容。 中間是節點向量的分佈圖。 |
基底函數如下
將節點向量的值直接代入t0~t7定義0≦u≦3, u為實數(有小數點的)
在此例中,基底函數的最後五個函數,畫出來如下圖(圖中k=2, n=4(5個控制點))
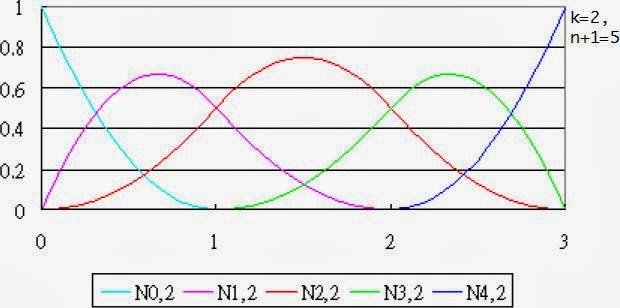 |
| 圖片來自:張家源,B-Spline 有限元素法解三維彈性力學問題,碩士論文,國立成功大學機械工程學系,台南(2008)[1] |
y是基底函數輸出的值。
注意:
幾條線就是幾個控制點×基底函數(N0,k~Nn,k)。
如果k等於n,那就是貝茲曲線了
最後把全部的東西,通通代入原式
依Ni,0的各個邊界條件整理一下式子,如下:
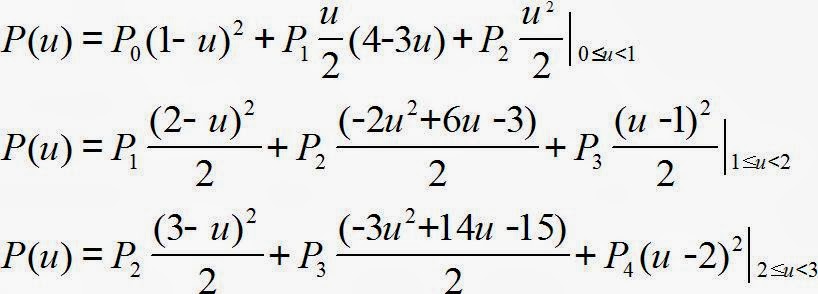
變動P0,第3式和第2式的曲線不受影響。
變動P1,第3式的曲線不受影響。
變動P2,全部都受影響。
變動P3,第1式的曲線不受影響。
變動P4,第1式和第2式的曲線不受影響。
f(x)=PB-spline(u)的意義,是一個點,定義在2維空間中p(x,y)
最後呈現出來的就像這樣,控制點沒有在曲線上面(像貝茲曲線這樣)
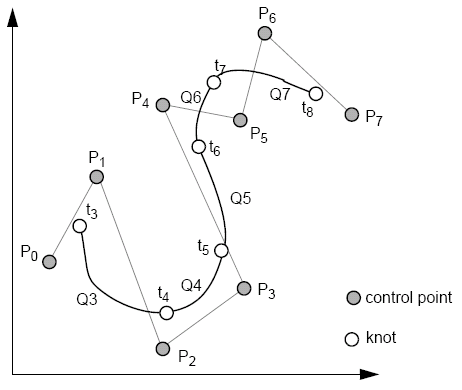 |
| 圖片來自: Computer Graphics and Visualisation[2] |
參考資料:
[1] 張家源,B-Spline 有限元素法解三維彈性力學問題,碩士論文,國立成功大學機械工程學系,台南(2008)
[2] Computer Graphics and Visualisation
發表於
tags:
{ 流浪文章 }